Основные диаметры
Для расчета параметров шкивов, а также привода в целом, применяются различные значения диаметров, так, для шкива клиноременной передачи используются:
- расчетный Dрасч;
- наружный Dнар;
- внутренний, или посадочный Dвн.
Для вычисления передаточного числа используется расчетный диаметр, а наружный-для расчета габаритов привода при компоновке механизма.
Для зубчатоременной передачи Dрасч отличается от Dнар на высоту зубца.Передаточное число также рассчитывается, исходя из значения Dрасч.

Для расчета плоскоременного привода, особенно при большом размере обода относительно толщины профиля, часто принимают Dрасч равным наружному.
Использование
Агрегаты с ЧПУ, оснащенные передачей плоскоременного типа, применяются в качестве станков, пилорам, генераторов, вентиляторов, а также в других сферах, где необходима работа приборов с повышенным уровнем гибкости и возможностью проскальзывания. Если оборудование используется на высоких скоростях, применяются синтетические материалы. На более низких скоростях используются кордтканевые и прорезиненные ремни.
Аналоги клинового типа применяются в сельскохозяйственной отрасли. Передача различного сечения способна выдержать высокие нагрузки и большую скорость. Машины промышленного класса предполагают использование вариаторов. Наилучшими характеристиками обладают зубчатые ремни. Их применяют как в промышленной, так и в бытовой области. Круглоременная передача применяются для маломощных приборов.
Основным минусом ременной передачи с ЧПУ является качество ремня. Даже самым качественным изделиям свойственно растягивание. Быстрее всего растягиваются длинные виды. Инструмент на растянутых ремнях не может обеспечить высокую точность обработки. Эффект растяжения можно снизить, закрепив два ремня друг на друга. Растягивается лишь определенный отрезок, поэтому этот недостаток не столь опасен.
Передача этого типа обеспечивает мягкие движения, при отсутствии резонанса. Пыль и стружка не способны негативно повлиять на ее работу. Предусмотрена возможность осуществлять натяжку ремня.
Используя станок с ЧПУ следует запомнить несколько факторов:
- зубчатые ремни обеспечивают перемещение подвижных частей агрегата;
- ремни делятся на замкнутые и незамкнутые;
- ремни из полиуретана более износостойкие;
- на станках с ЧПУ допускается использование армированных ремней.
Передача данного типа на приборах с ЧПУ на высоких скоростях способна уменьшить уровень мощности и точности. Данный недостаток решается при помощи установки специального оборудования. После их установки может понадобиться настройка драйверов. Данное действие требуется для того, чтобы сгладить работу агрегата. Оно производится в настройках программы. Значение для шкивов, обеспечивающих правильно перемещение, зависит о того, какой модели выбран станок, или ШВП.
Для агрегатов с числовым программным управлением, использующих ременную передачу, не требуется специальных программоноситель. Программа составляется и разрабатывается в зависимости от того, для какого типа работ она необходима. Для того, чтобы устройство работало исправно в автономном режиме, следует периодически проверять его состояние. Программа не может решить проблему неисправного оборудования.
Применение шкивов
Клиновые приводы – одни из самых широко используемых в самых различных механизмах и устройствах с высоким крутящим моментом и угловой скоростью. Прежде всего- это двигатели внутреннего сгорания. Кроме того, клиноременные пары применяются в таких областях, как:
- вентиляторы и кондиционеры;
- компрессорные установки, как поршневых, так и винтовых;
- транспортные системы зданий: лифты, эскалаторы, травелаторы;
- сельхозмашины;
- дорожно-строительная техника;
- горные машины;
- промышленные технологические установки;
- станки;
- бытовая техника;
- ручной электроинструмент;
и во многих других отраслях.
Зубчатые передачи используются в тех случаях, когда требуется передать значительный крутящий момент без пробуксовок. Зубчатоременной привод не требует сильного натяжения для хорошего сцепления. Он дает существенно меньшую радиальную нагрузку на ось, чем другие ременные передачи.
Применяются такие приводы в:
- автомобильных моторах, для механизма газораспределения;
- силовых приводах станков и промышленных механизмов;
- в технологических установках пищевой, фармацевтической, химической отрасли.
Поликлиновые шкивы отлично справляются в так называемых серпантинных передачах, когда один привод снабжает энергией вращения много потребителей, и при этом следует по весьма извилистой траектории. Поликлиновые передачи позволяют передавать значительные моменты и достигать больших оборотов без увеличения габаритов.
Их используют как в тяжелом машиностроении, так и в производстве бытовой техники.
Вариаторные приводные колеса применяются везде, где необходимо без остановки вращения и снятия нагрузки плавно изменять обороты и крутящий момент. Они популярны в таких сферах, как:
- трансмиссии автомобилей, мотоциклов, другого колесного транспорта;
- конвейеры;
- точные станки для обработки металла, дерева и других материалов;
- сельхозмашины.
Современный вариатор превосходит по своим эксплуатационным характеристикам и ручные, и гидравлические трансмиссии.
Плоскоременные приводы используются там, где требуется передать вращение на значительные расстояния (до 7-9 м) и погасить удары, толчки и другие динамические нагрузки, передаваемые от ведущего вала к ведомому (или в обратном направлении). Они применяются:
- в прессовом и другом кузнечном оборудовании;
- в приводах лесопилок;
- в технологическом оборудовании текстильной промышленности;
- в мощных центробежных насосах.
Круглоременные приводы используются для малонагруженных передач в точных приборах, бытовой электронике и технике.
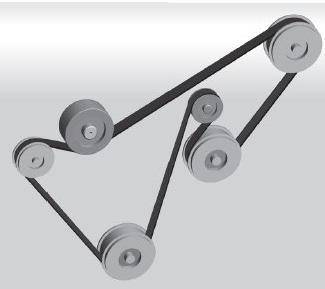
Они также легко перекрещиваются и, при посредстве дополнительных пассивных шкивов позволяют связывать ведомый и ведущий валы, находящиеся в разных плоскостях и под углом друг к другу, а также изменять направление вращения.
История
Ремённая передача – одна из древнейших и простых механических передач, в которой используются приводные ремни и специальные колеса — шкивы. По некоторым источникам, ременная передача впервые документально описана китайским философом, поэтом и политиком Ян Сюном (53 год до н. э. – 18 год н. э.) периода империи Хань в тексте «Словарь местных выражений». Описанное устройство использовали ткачи в своей работе с шелком.
Кстати, слово «ремённая» записывается через букву «ё», на которую и нужно ставить ударение. Но в печати, например, в нашем следующем заголовке, точки над «ё» могут опускать. Это не является ошибкой, но не забудьте ставить ударение правильно.
На средневековых картинах можно увидеть механизм — самопрялку, в которой принцип ремённой передачи используется для ускорения получения пряжи. Большое развитие ремённая передача вместе с другими механизмами получила во времена английской промышленной революции (1780-1830 гг.), которая началась с изобретения в 1769 году паровой машины. Небольшие кустарные ремесленные производства начали вытесняться фабричным трудом с большим количеством машин.
Рис. 1. Слева. Фрагмент из «Декреталий Григория IX». Примерно 1340 год. Справа. Мартен ван Хемскерк. Портрет женщины с прялкой. 1529 год
Рис. 2. Типография в 1870 году
На приведенной ниже картинке показаны примеры использования ремённой передачи в современных технических устройствах – от двигателя внутреннего сгорания автомобиля до 3D-принтера.
Рис. 3. Примеры использования ремённых передач. А – ремень ГРМ на электрогенераторе двигателя автомобиля. Б – механизм кассетного магнитофона. В – зубчатый ремень 3D -принтера. Г – ремень вместо цепи на велосипеде. Д – ремённая передача на роторной косилке мотоблока
Типы шкивов для клиновых ремней
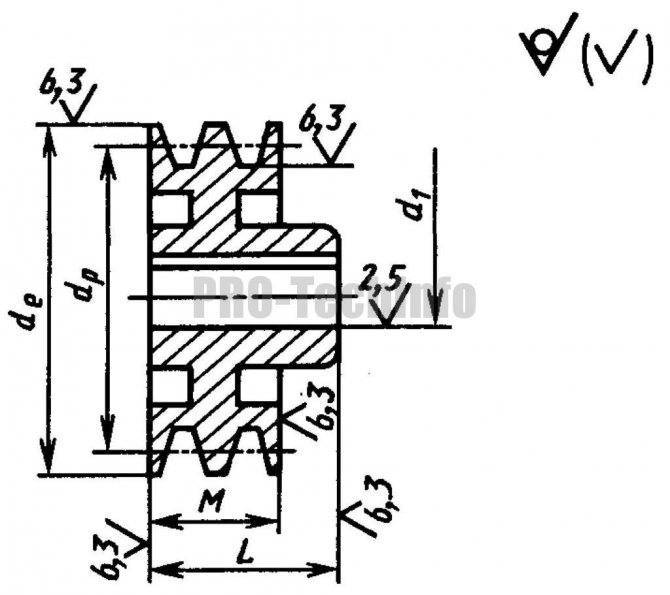
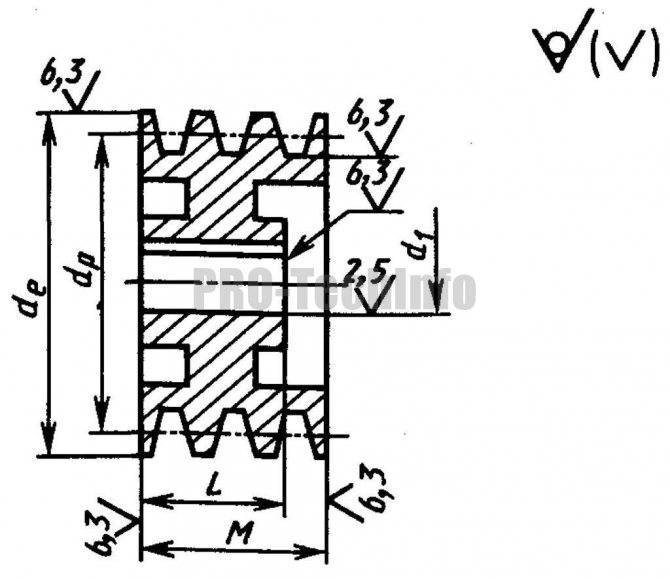
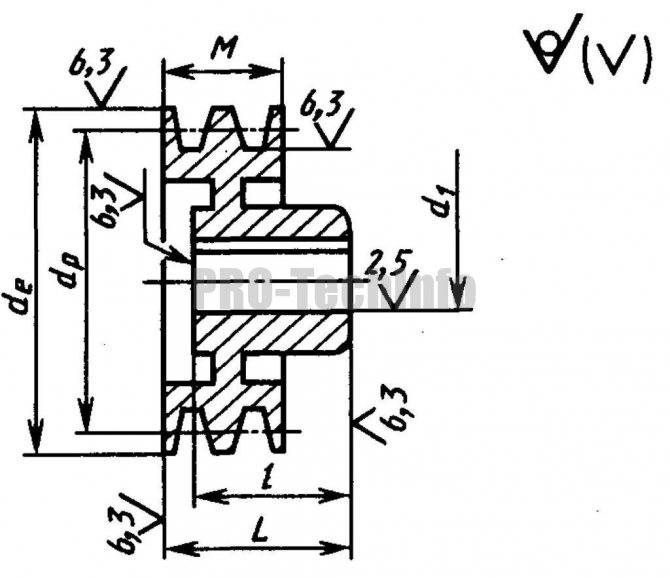
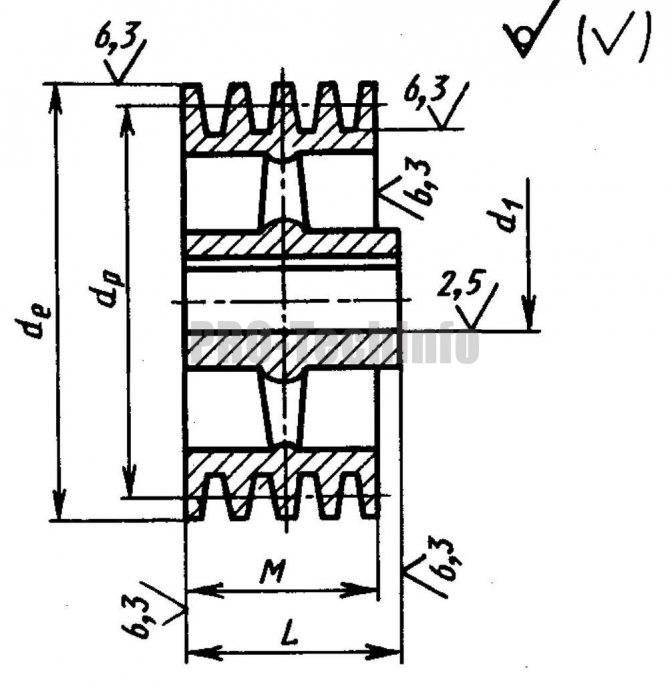
В зависимости от конструкции различают шкивы типов 1…6 (рис. 1…6) и типов 7…9 (рис. 7…9).
Шкив типа 1 — монолитный с односторонней выступающей ступицей.
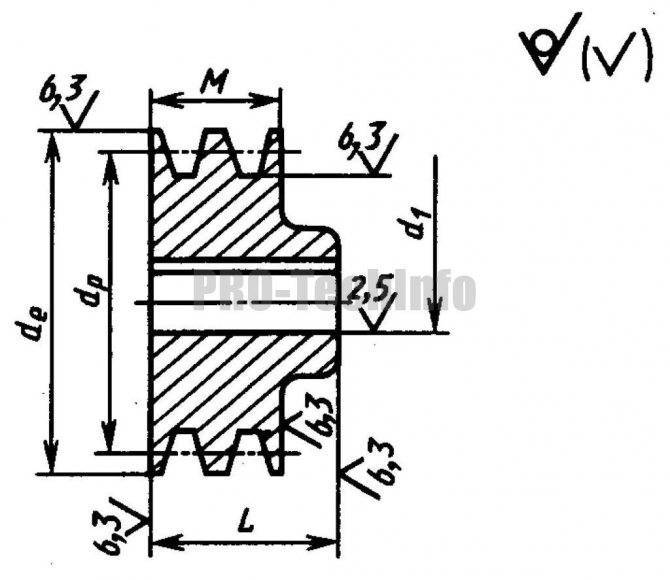
Шкив типа 2 — монолитный с односторонней выточкой.

Шкив типа 3 — монолитный с односторонней выточкой и выступающей ступицей.
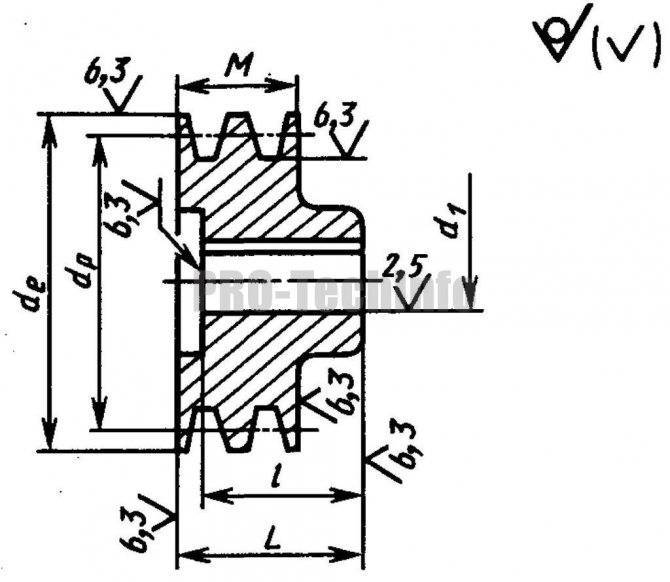
Шкив типа 4 — с диском и ступицей, выступающей с одного торца обода.
Шкив типа 5 — с диском и ступицей, укороченной с одного торца обода.
Шкив типа 6 — с диском и ступицей, выступающей с одного и укороченной с другого торца обода.
Шкив типа 7 — со спицами и ступицей, выступающей с одного торца обода.
Шкив типа 8 — со спицами и ступицей, укороченной с одного торца обода.

Шкив типа 9 — со спицами и ступицей, выступающей с одного и укороченной с другого торца обода.
Простейший регулятор оборотов электродвигателя своими руками
Изготавливая различные самоделки, приходится сталкиваться с рядом проблем и поиском их решений. Так и в случае с различными приспособлениями, которые имеют в своей конструкции коллекторный электродвигатель.
Очень часто нужно сделать так, чтобы двигатель имел регулируемые обороты. Для этих целей используется регулятор (контроллер) оборотов двигателя, который можно собрать своими руками.
Представленный ниже регулятор для электродвигателей позволяет не только обеспечить плавный пуск мотора и степень регулировки оборотов, но и защитить двигатель от перегрузок. Работать контроллер может не только от 220 Вольт, но и от пониженного напряжения, вплоть от 110 Вольт.
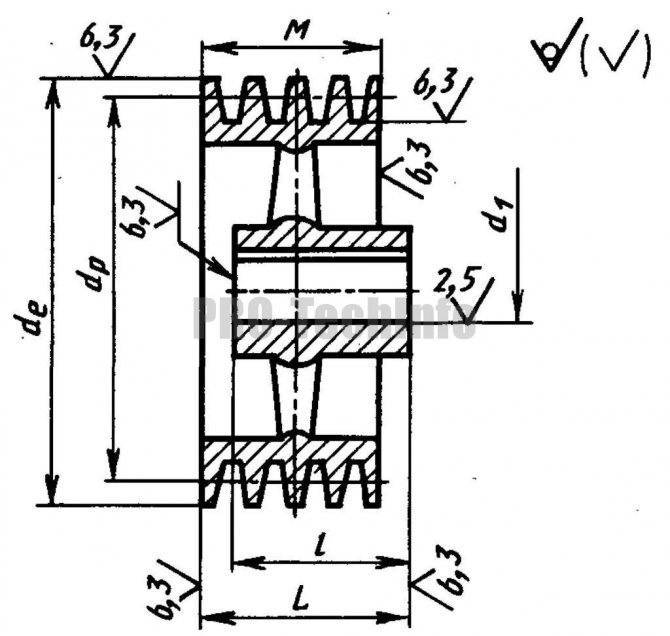
Основные диаметры
Для расчета параметров шкивов, а также привода в целом, применяются различные значения диаметров, так, для шкива клиноременной передачи используются:
- расчетный D расч;
- наружный D нар;
- внутренний, или посадочный D вн.
Для вычисления передаточного числа используется расчетный диаметр, а наружный-для расчета габаритов привода при компоновке механизма.
Для зубчатоременной передачи D расч отличается от D нар на высоту зубца. Передаточное число также рассчитывается, исходя из значения D расч.

Для расчета плоскоременного привода, особенно при большом размере обода относительно толщины профиля, часто принимают D расч равным наружному.
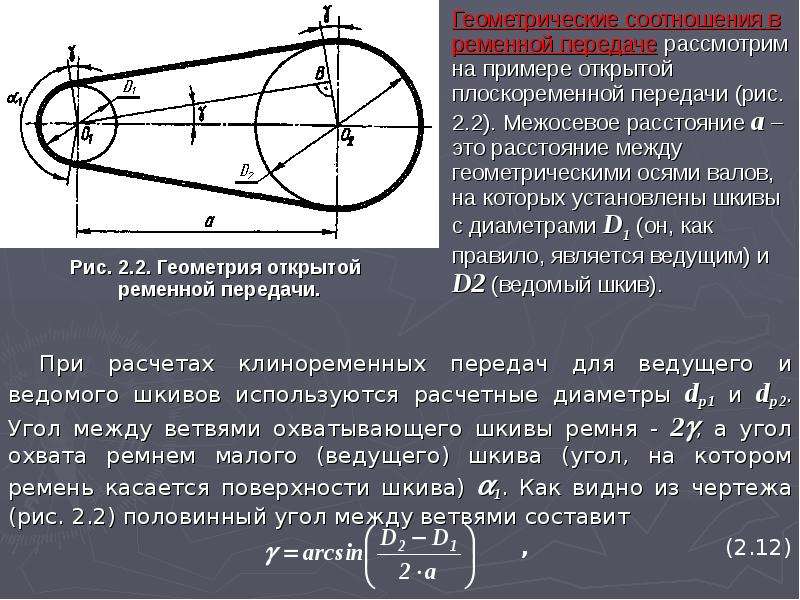
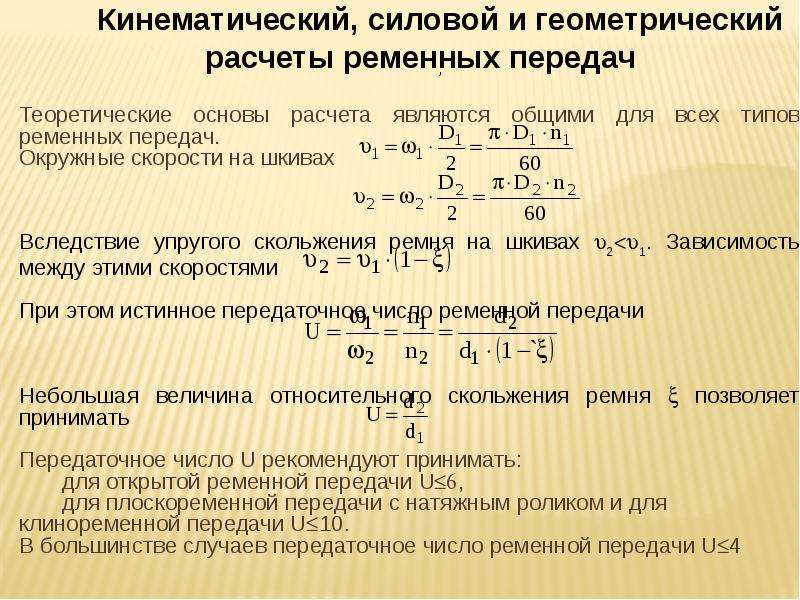
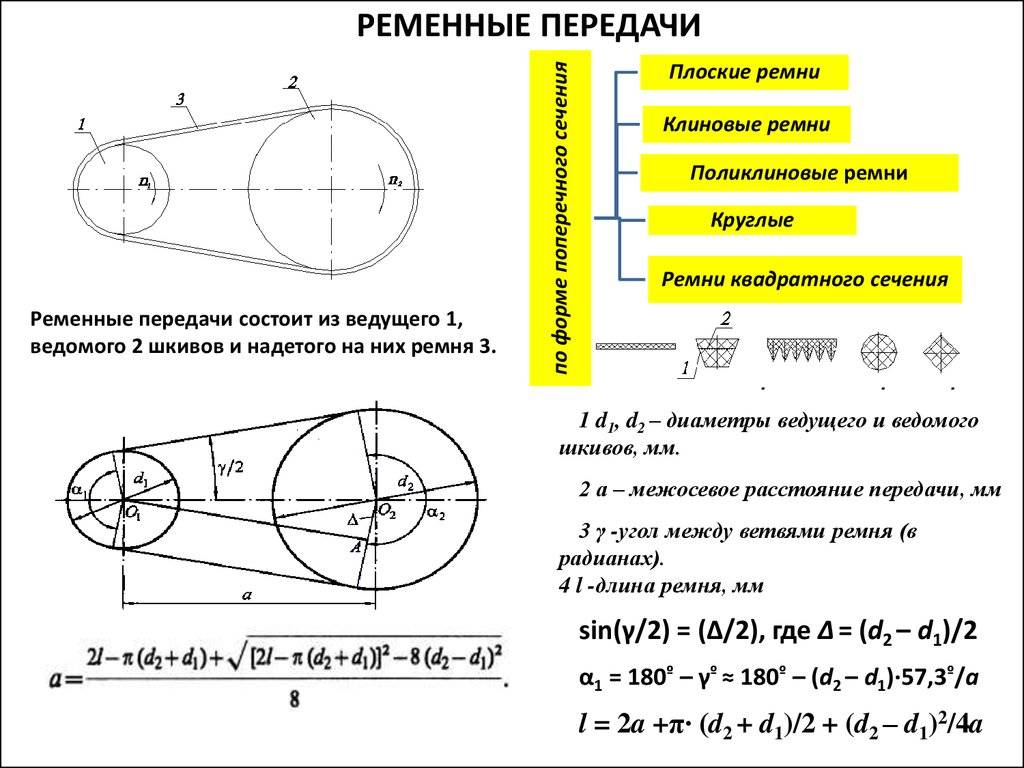
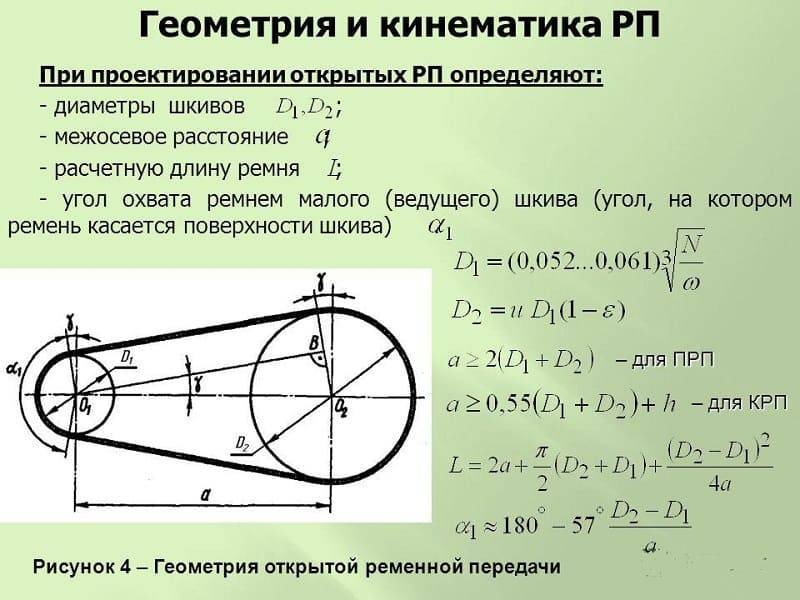
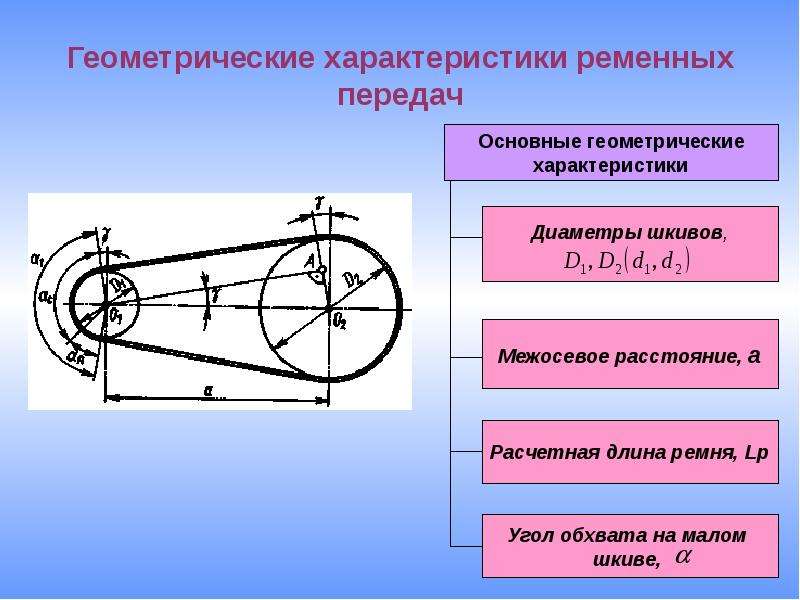
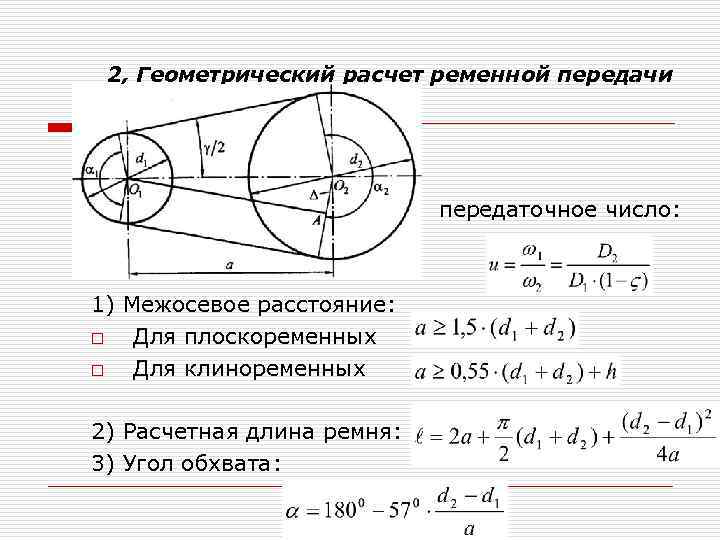
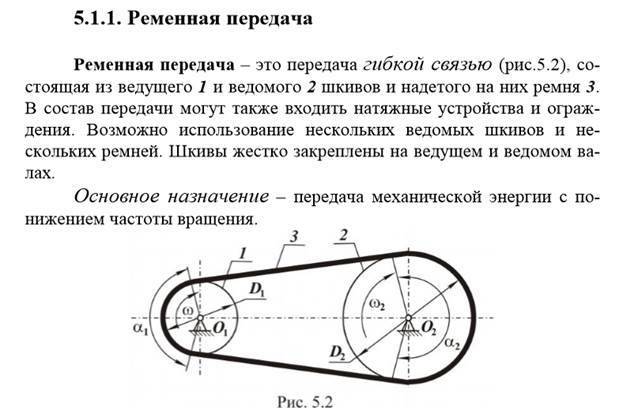
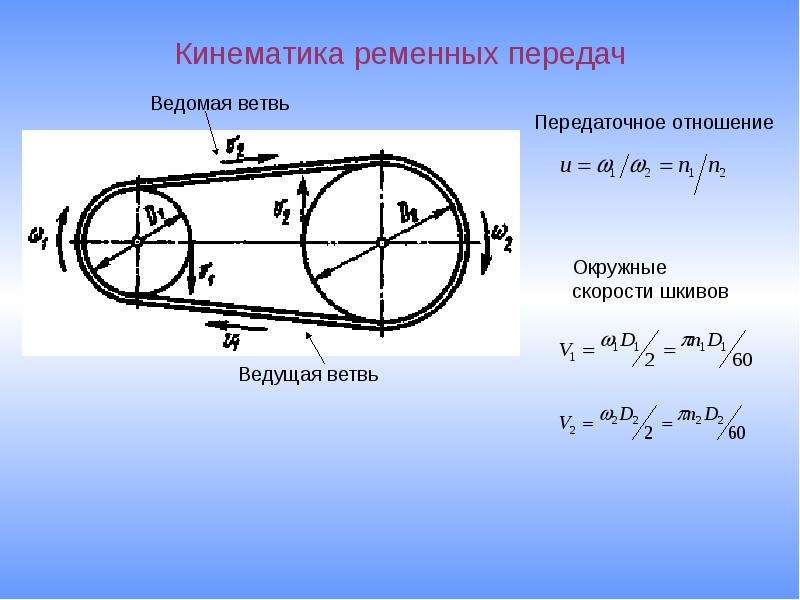
Устройство ременной передачи, ее характеристики
Ременная передача представляет собой пару шкивов, соединенных бесконечным закольцованным ремнем. Эти приводные колеса, как правило, располагают в одной плоскости, а оси делают параллельными, при этом приводные колеса вращаются в одном направлении. Плоские (или круглые) ремни позволяют изменять направление вращения за счет перекрещивания, а взаимное расположение осей- за счет использования дополнительных пассивных роликов. При этом теряется часть мощности.

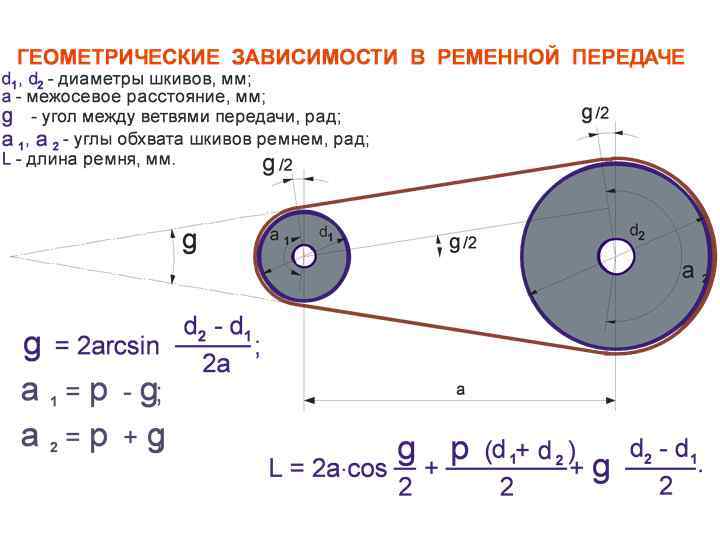
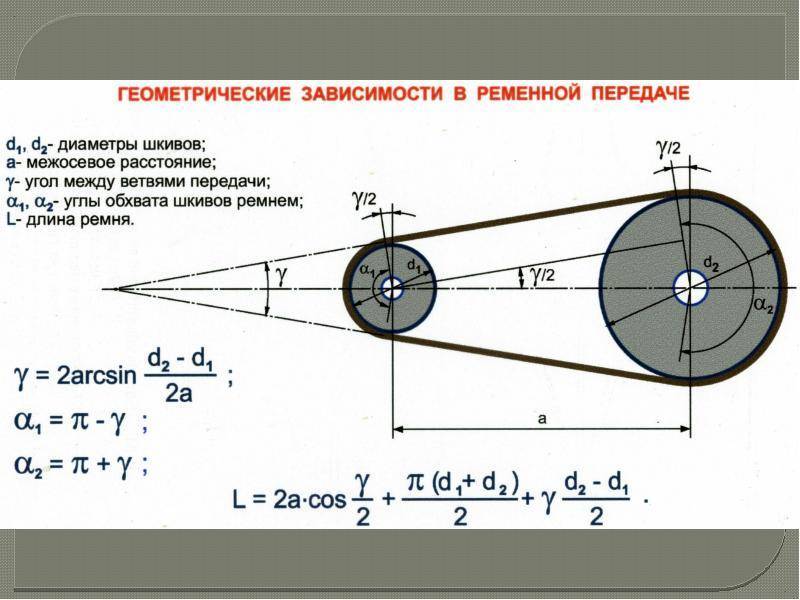
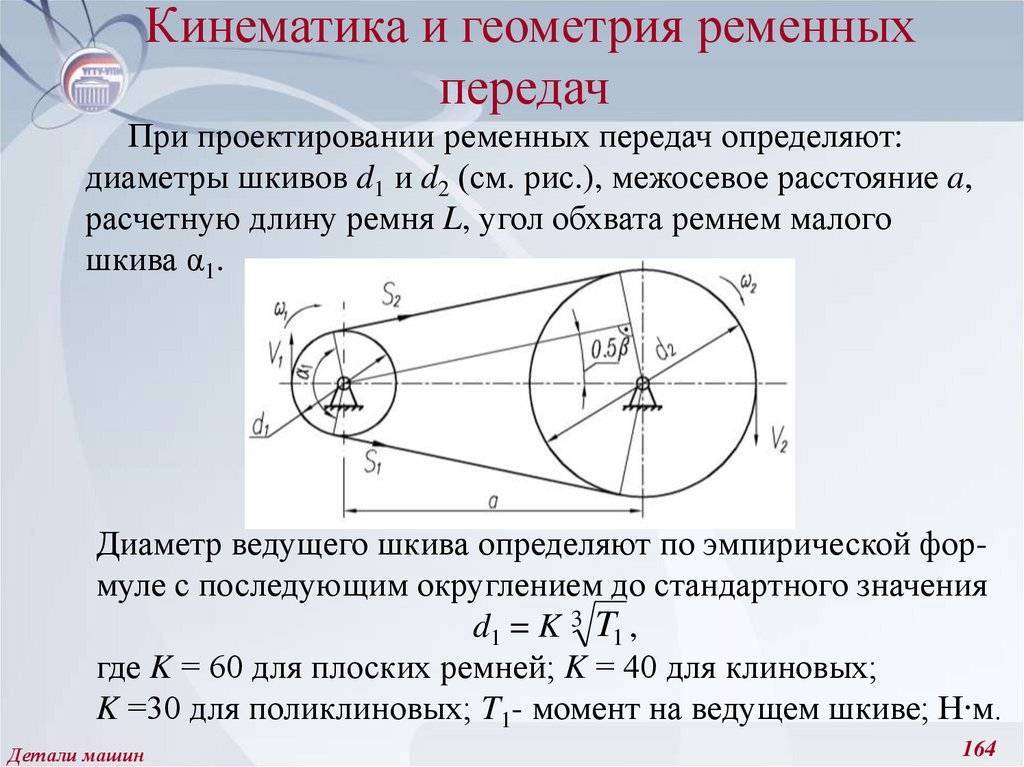
Для расчета привода важны следующие основные параметры:
- число оборотов ведущего вала;
- мощность, передаваемую приводом;
- потребное число оборотов ведомого вала;
- профиль ремня, его толщина и длина;
- расчетный, наружный, внутренний диаметр колеса;
- профиль канавки (для клиноременного);
- шаг передачи (для зубчатоременного)
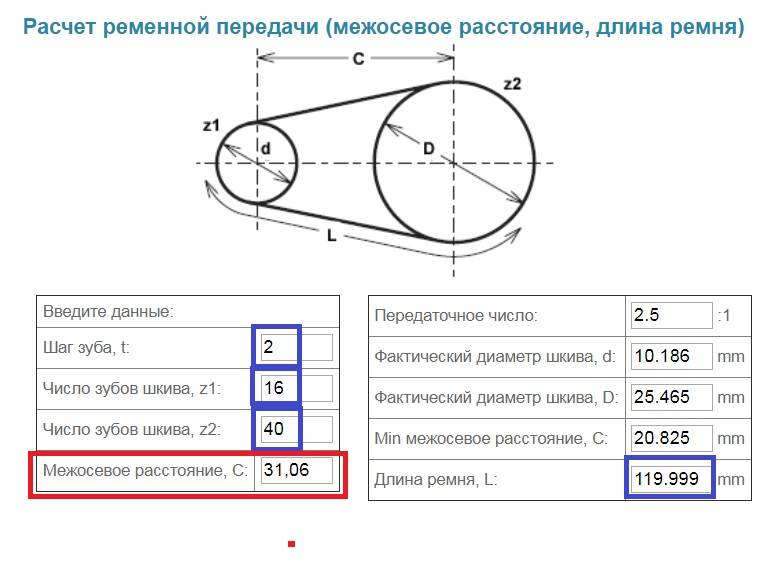
- межосевое расстояние;
Вычисления обычно проводят в несколько этапов.
От сети
Однофазные электродвигатели переменного тока также позволяют регулировать вращение ротора.
Коллекторные машины
Такие моторы стоят на электродрелях, электролобзиках и другом инструменте. Чтобы уменьшить или увеличить обороты, достаточно, как и в предыдущих случаях, изменять напряжение питания. Для этой цели также есть свои решения. Конструкция подключается непосредственно к сети. Регулировочный элемент – симистор, управление которого осуществляется динистором. Симистор ставится на теплоотвод, максимальная мощность нагрузки – 600 Вт.
Если есть подходящий ЛАТР, можно все это делать при помощи его.
Двухфазный двигатель
Аппарат, имеющий две обмотки – пусковую и рабочую, по своему принципу является двухфазным. В отличие от трехфазного имеет возможность менять скорость ротора. Характеристика крутящегося магнитного поля у него не круговая, а эллиптическая, что обусловлено его устройством. Есть две возможности контролирования числа оборотов:
- Менять амплитуду напряжения питания (Uy);
- Фазное – меняем емкость конденсатора.
Такие агрегаты широко распространены в быту и на производстве.
Обычные асинхронники
Электрические машины трехфазного тока, несмотря на простоту в эксплуатации, обладают рядом характеристик, которые нужно учитывать. Если просто изменять питающее напряжение, будет в небольших пределах меняться момент, но не более. Чтобы в широких пределах регулировать обороты, необходимо довольно сложное оборудование, которое просто так собрать и наладить сложно и дорого.
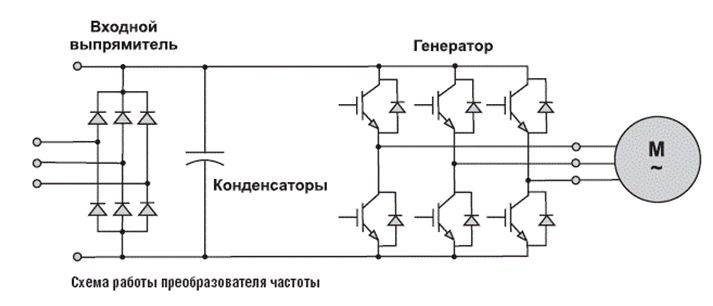
Для этой цели промышленностью налажен выпуск частотных преобразователей, помогающих менять обороты электродвигателя в нужном диапазоне.
Асинхронник набирает обороты в согласии с выставленными на частотнике параметрами, которые можно менять в широком диапазоне. Преобразователь – самое лучшее решение для таких двигателей.
Основные диаметры
Для расчета параметров шкивов, а также привода в целом, применяются различные значения диаметров, так, для шкива клиноременной передачи используются:
- расчетный Dрасч;
- наружный Dнар;
- внутренний, или посадочный Dвн.
Для вычисления передаточного числа используется расчетный диаметр, а наружный-для расчета габаритов привода при компоновке механизма.
Для зубчатоременной передачи Dрасч отличается от Dнар на высоту зубца.Передаточное число также рассчитывается, исходя из значения Dрасч.

Для расчета плоскоременного привода, особенно при большом размере обода относительно толщины профиля, часто принимают Dрасч равным наружному.
Как изготовить своими руками?
Существуют различные варианты схем регулировки. Приведём один из них более подробно.
Вот схема его работы:
Первоначально, это устройство было разработана для регулировки коллекторного двигателя на электротранспорте. Речь шла о таком, где напряжение питания составляет 24 В, но эта конструкция применима и для других двигателей.
Слабым местом схемы, которое было определено при испытаниях её работы, является плохая пригодность при очень больших значениях силы тока. Это связано с некоторым замедлением работы транзисторных элементов схемы.
Рекомендуется, чтобы ток составлял не более 70 А. В этой схеме нет защиты по току и по температуре, поэтому рекомендуется встроить амперметр и контролировать силу тока визуально. Частота коммутации составит 5 кГц, она определяется конденсатором C2 ёмкостью 20 нф.
При этом, рекомендуется подобрать величину R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы, управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, далее идёт уже на транзисторы.
Печатная плата имеет размер 50 на 50 мм и изготавливается из одностороннего стеклотекстолита:
На этой схеме дополнительно указаны 2 резистора по 45 ом. Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения прибора. При использовании в качестве нагрузки электродвигателя, необходимо схему заблокировать блокирующим (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению питающего напряжения.
Работа устройства при отсутствии такого диода может привести к поломке вследствие возможного перегрева. При этом, диод нужно будет поместить на теплоотвод. Для этого, можно воспользоваться металлической пластиной, которая имеет площадь 30 см2.
Регулирующие ключи работают так, что потери мощности на них достаточно малы. В оригинальной схеме, был использован стандартный компьютерный вентилятор. Для его подключения использовалось ограничительное сопротивление 100 Ом и напряжение питания 24 В.
Собранное устройство выглядит следующим образом:
При изготовлении силового блока (на нижнем рисунке), провода должны быть присоединены таким образом, чтобы было минимум изгибов тех проводников по которым проходят большие токи.Мы видим, что изготовление такого прибора требует определённых профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл воспользоваться покупным устройством.
Источник
Плоские ремни ременных передач
Типы передач бывают следующими:
- Открытые – с параллельными осями и вращением шкивов в одном направлении.
- Шкивы со ступенями – можно изменить обороты ведомого вала, при этом у ведущего они постоянные.
- Перекрестные, когда оси параллельны, а вращение происходит в разных направлениях.
- Полуперекрестные – оси валов скрещиваются.
- С натяжным роликом, увеличивающим угол обхвата шкива меньшего диаметра.

Ременная передача открытого типа применяется для работы при высокой скорости и с большим межосевым расстоянием. Высокие КПД, нагрузочная способность и долговечность позволяют использовать ее в промышленности, в частности для сельскохозяйственных машин.

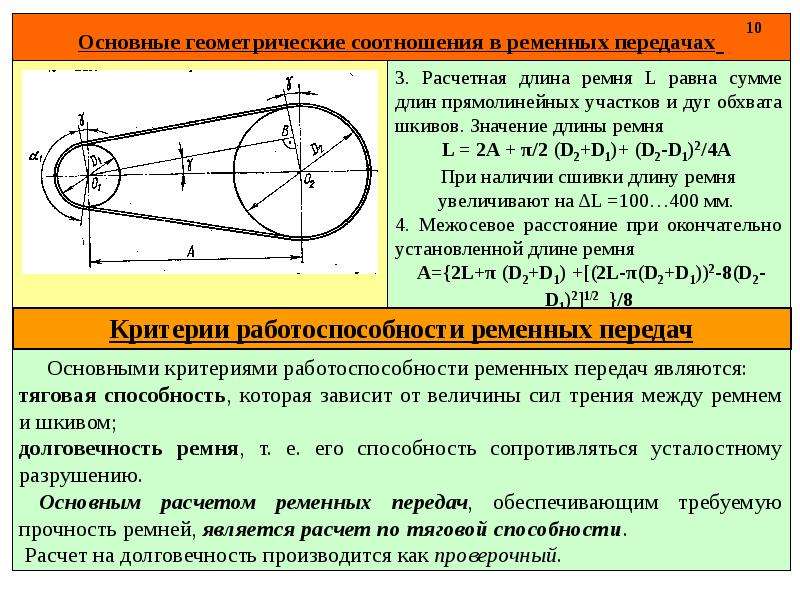
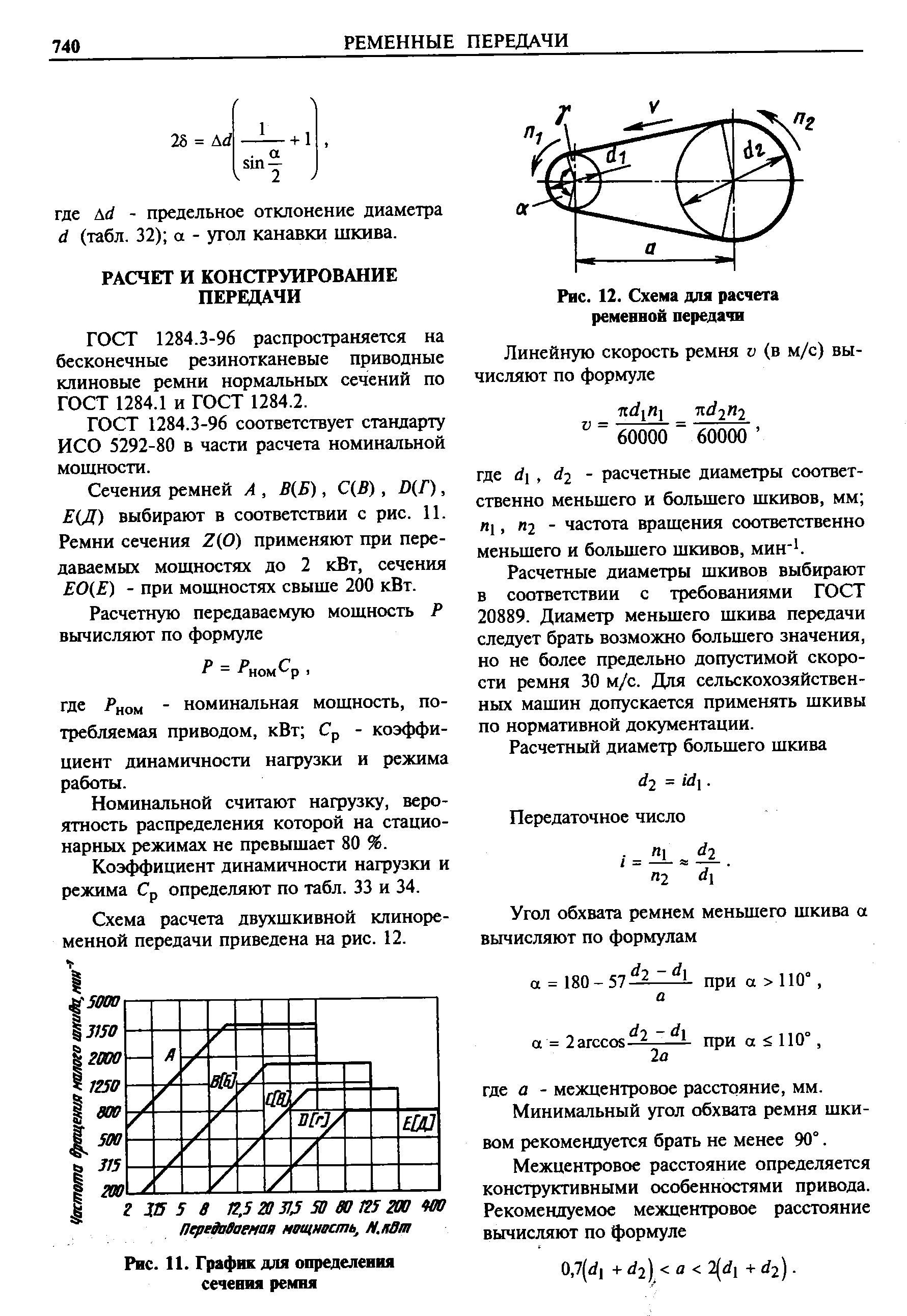
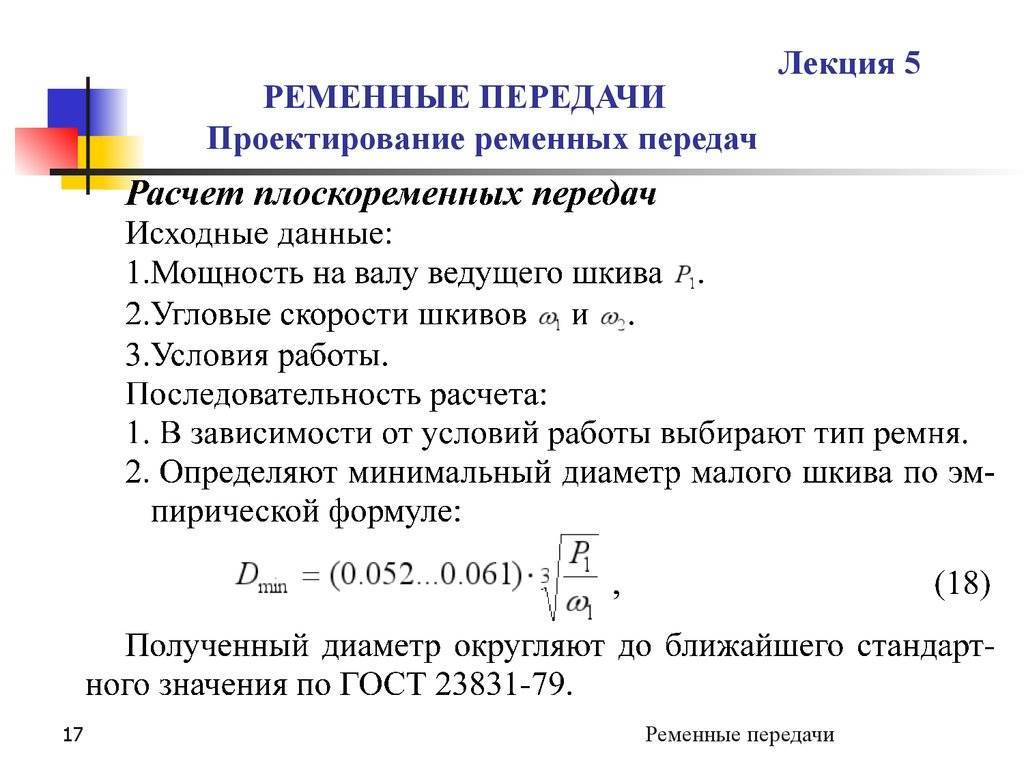
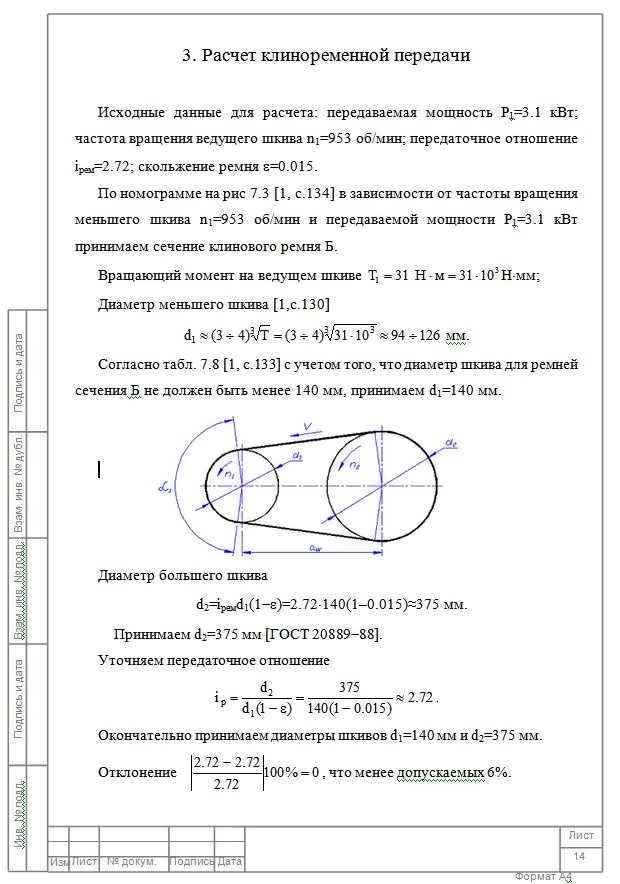
Расчет передачи
Расчет клиноременной передачи производится по установленной методике. При этом определяется показатель передаваемой мощности механизма. Она рассчитывается по следующей формуле:
Читать также: Как устроен редуктор давления воды
М = Мном. * К, где Мном. – номинальная мощность, которую потребляет привод при работе, кВт; К – коэффициент динамической нагрузки.

При проведении расчетов во внимание берется показатель, вероятность распределения которого в стационарном режиме составляет не более 80%. Коэффициент нагрузки и режима представлены в специальных таблицах
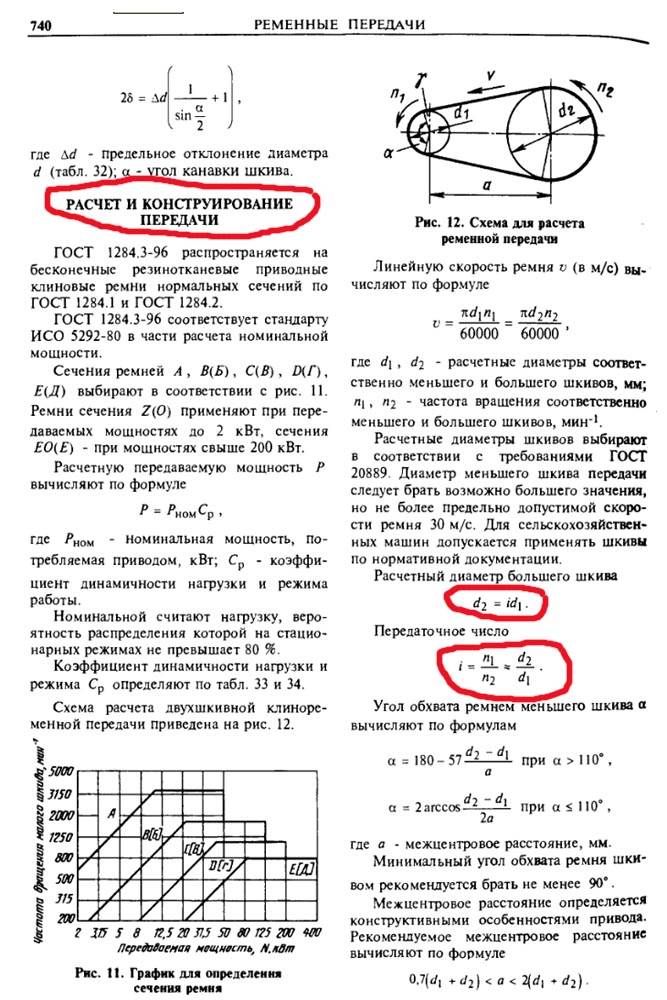
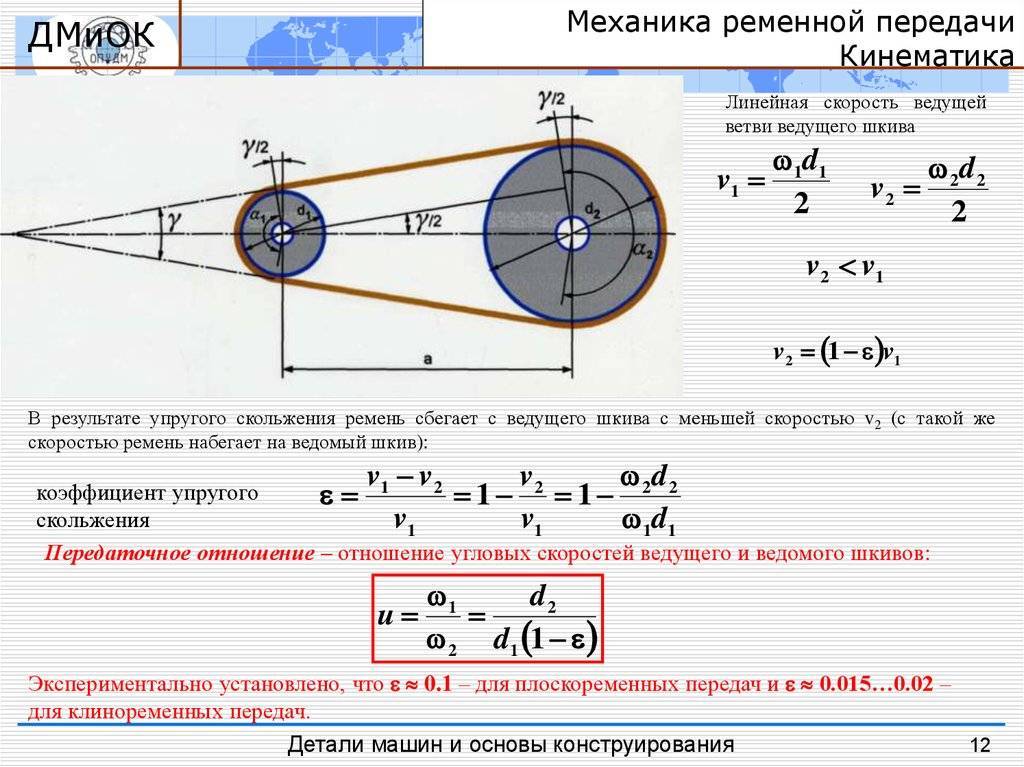
При этом можно определить скорость для ремня. Она будет составлять:
СР = π * Д1 * ЧВ1/6000 = π * Д2 * ЧВ2/6000, где Д1, Д2 – диаметр меньшего и большего шкива (соответственно); ЧВ1, ЧВ2 – частота вращения меньшего и большего диска. Диаметр меньшего шкива не должен превышать расчетную предельно допустимую скорость ремня. Она составляет 30 м/с.
Расчeт и подбор серводвигателя для шарико-винтовой пары
Сервопривод, на базе синхронного двигателя с датчиком обратной связи (энкодером), стал неотъемлемой частью большинства станков, в которых необходима прецизионность, высокая динамика процессов и надежность. О достоинствах сервопривода в сравнении с другими типами электроприводов (асинхронного, синхронного реактивного, постоянного тока) используемых в станкостроении написано множество литературы. Основной особенностью сервопривода на базе синхронного двигателя с постоянными магнитами (рассматриваемого в этой статье), является то, что он может кратковременно обеспечивать момент до 350% от номинального, что позволяет обеспечить высокую динамику и выбирать двигатель с меньшим номинальным моментом, чем в случаях с другими типами двигателей. Содержание этой статьи будет актуально для специалистов уже определившихся с типом оборудования, но не знающих как подобрать серводвигатель.
Очень часто инженеры сталкиваются с проблемой подбора серводвигателя для того или иного типа применения. Выбор номинальных характеристик двигателя не должен носить эмпирический характер, так как существует единственный проверенный способ – расчёт параметров двигателя. Этот расчёт производится исходя из условий функционирования системы и требований к ней. В статье приведены схема (рис.1) и пример расчета серводвигателя YASKAWA серии SIGMA 5 в применении с шарико-винтовой парой (ШВП) – преобразователем вращательного движения в поступательное линейное.
Рисунок 1. Кинематическая схема механизма серводвигатель – ШВП. Зададим исходные параметры:
- Скорость нагрузки: ϑL=15 м/мин;
- Масса элементов поступательного движения: m=250 кг;
- Длина винта: lB=1,0 м;
- Диаметр винта: dB=0,02 м;
- Шаг резьбы винта: PB=0,01 м ;
- Плотность шарика: ρ=7,87×〖10〗^3 кг/м3;
- Передаточное число редуктора: i=2;
- Суммарный момент инерции редуктора и соединительной муфты: JG=0,40×〖10〗^(-4) кг*м2;
- Частота подач (перемещений): n=40 мин-1;
- Дистанция перемещения (позиционирования): l=0,275 м;
- Максимальное время перемещения (позиционирования): tm=1,2 с;
- Точность остановки: δ=±0,01 мм;
- Коэффициент трения скольжения: μ=0,2;
- КПД механики: η=0,9 (90%).
Расчёт времени при помощи циклограммы линейного перемещения
Для точного расчёта параметров мотора под требуемую задачу, нужно составить циклограмму движения механизма (рабочего органа). В данном случае движение рабочего органа будет циклическим.
Рисунок 2. Циклограмма линейной скорости.
Из циклограммы видно, что время ускорения и торможения имеют равные значения, следовательно, мы получаем:
Расчёт скорости вращения вала серводвигателя
Скорость вращения винта ШВП: nL=ϑL/PB =15/0,01=1500 об/мин;
Скорость вращения вала двигателя: nM=nL×i=1500×2=3000 об/мин.
Момент инерции подшипников:
Суммарный момент инерции муфты и редуктора:
Суммарный момент инерции:
А) Выбор серводвигателя, удовлетворяющего условиям:
B) Технические характеристики предварительно выбранного серводвигателя:
- Серводвигатель SGMJV-02A;
- Номинальная мощность: 200 Вт;
- Номинальная скорость: 3000 об/мин;
- Номинальный момент: 0,637 Нм;
- Пиковый момент: 2, 23 Нм;
- Момент инерции двигателя: 0,259×〖10〗^(-4) кг*м2;
- Допустимый момент инерции нагрузки: 15×0,259×〖10〗^(-4)=3,385×〖10〗^(-4) кг*м2;
Механическая характеристика двигателя (зависимость скорости от момента):
Рисунок 3. Механическая характеристика серводвигателя SGMJV-02A.
Серводвигатели YASKAWA при разгоне и торможении могут превышать номинальный момент до 350% в течении 2 сек, чему соответствует перегрузочная характеристика серводвигателя:
Немного теории об устройстве и области применения коллекторных электродвигателей
Электродвигатели этого типа могут быть постоянного или переменного тока, с последовательным, параллельным или смешанным возбуждением ( для переменного тока применяется только первые два вида возбуждения).
Коллекторный электродвигатель состоит из ротора, статора, коллектора и щеток. Ток в цепи, проходящий через соединенные определенным образом обмотки статора и ротора, создает магнитное поле, заставляющее последний вращаться. Напряжение на ротор передается при помощи щеток из мягкого электропроводного материала, чаще всего это графит или медно-графитовая смесь. Если изменить направление тока в роторе или статоре, вал начнет вращаться в другую сторону, причем это всегда делается с выводами ротора, что бы не происходило перемагничивание сердечников.
При одновременном изменении подключения и ротора и статора реверсирования не произойдет. Существуют также трехфазные коллекторные электродвигатели, но это уже совсем другая история.
Электродвигатели постоянного тока с параллельным возбуждением
Обмотка возбуждения (статорная) в двигателе с параллельным возбуждением состоит из большого количества витков тонкого провода и включена параллельно ротору, сопротивление обмотки которого намного меньше. Поэтому для уменьшения тока во время запуска электродвигателей мощностью более 1 Квт в цепь ротора включают пусковой реостат. Управление оборотами электродвигателя при такой схеме включения производится путем изменения тока только в цепи статора, т.к. способ понижения напряжения на клеммах очень не экономичен и требует применение регулятора большой мощности.
Электродвигатели постоянного тока с последовательным возбуждением
Обмотка возбуждения такого электродвигателя имеет небольшое число витков толстого провода, и при ее последовательном включении в цепь якоря ток во всей цепи будет одинаков. Электродвигатели этого типа более выносливы при перегрузках и поэтому наиболее часто встречаются в бытовых устройствах.
- Подключением параллельно статору регулировочного устройства, изменяющего магнитный поток. Однако этот способ довольно сложен в реализации и не применяется в бытовых устройствах.
- Регулирование (снижение) оборотов с помощью уменьшения напряжения. Этот способ применяется практически во всех электрических устройствах – бытовых приборах, инструменте и т.д.
Эти однофазные моторы имеют меньший КПД, чем двигатели постоянного тока, но из за простоты изготовления и схем управления нашли наиболее широкое применение в бытовой технике и электроинструменте. Их можно назвать “универсальными”, т.к. они способны работать как при переменном, так и при постоянном токе. Это обусловлено тем, что при включении в сеть переменного напряжение направление магнитного поля и тока будет изменяться в статоре и роторе одновременно, не вызывая изменения направления вращения. Реверс таких устройств осуществляется переполюсовкой концов ротора.
Основные диаметры
Для расчета параметров шкивов, а также привода в целом, применяются различные значения диаметров, так, для шкива клиноременной передачи используются:
- расчетный D расч;
- наружный D нар;
- внутренний, или посадочный D вн.
Для вычисления передаточного числа используется расчетный диаметр, а наружный-для расчета габаритов привода при компоновке механизма.
Для зубчатоременной передачи D расч отличается от D нар на высоту зубца. Передаточное число также рассчитывается, исходя из значения D расч.

Для расчета плоскоременного привода, особенно при большом размере обода относительно толщины профиля, часто принимают D расч равным наружному.
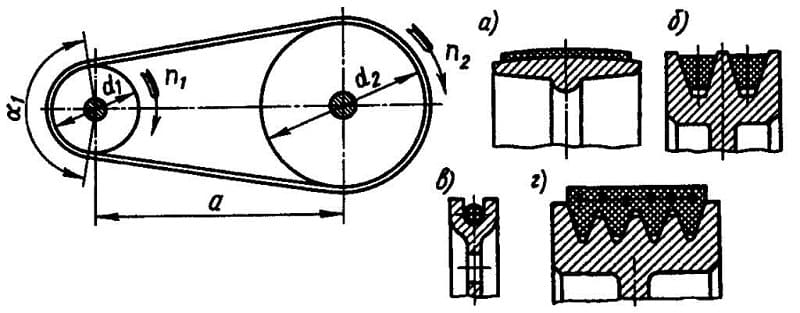
Требования к элементам конструкции
Ремни клиновые обладают относительно небольшой толщиной. Это позволяет значительно сократить габариты, занимаемые системой. Однако этот факт требует особого подхода к организации геометрии шкива. Чтобы лента с него не соскакивала, внешняя поверхность дисков имеет специальные канавки. Они удерживают ремень в пазах.
Размер самого шкива подбирается в соответствии с передаточным соотношением. Если необходимо создать понижающую передачу, ведомый шкив будет больше ведущего элемента конструкции. Существует и обратное соотношение.
При изготовлении ленты ремня применяются специальные мягкие материалы, которые не должны терять своих эксплуатационных качеств при любых погодных условиях. В мороз и жару ремень остается гибким. Именно по этой причине не допускается установка вместо специальной ленты иного материала. Это приведет к поломке агрегата.
Шкивы
Шкив ременной передачи бывает литым, сварным или сборным. Материал выбирают в зависимости от оборотов. Если он изготовлен из текстолита или пластмассы, скорость составляет не более 25 м/с. Если она превышает 5 м/с, требуется статическая балансировка, а для быстроходных передач – динамическая.В процессе работы у шкивов с плоскими ремнями происходит износ обода от проскальзывания, надлом, трещины, поломка спиц. В клиноременных передачах изнашиваются канавки на рабочих поверхностях, ломаются буртики, происходит разбалансировка.

Если вырабатывается отверстие ступицы, его растачивают, а затем запрессовывают втулку. Для большей надежности ее делают одновременно с внутренним и наружным шпоночными пазами. Тонкостенную втулку устанавливают на клей и крепят болтами через фланец.


Трещины и изломы заваривают, для чего шкив сначала разогревают для устранения остаточных напряжений.
При обтачивании обода под клиновидный ремень допускается, что частота вращения может изменяться до 5% от номинальной.
Использование
Агрегаты с ЧПУ, оснащенные передачей плоскоременного типа, применяются в качестве станков, пилорам, генераторов, вентиляторов, а также в других сферах, где необходима работа приборов с повышенным уровнем гибкости и возможностью проскальзывания. Если оборудование используется на высоких скоростях, применяются синтетические материалы. На более низких скоростях используются кордтканевые и прорезиненные ремни.
Аналоги клинового типа применяются в сельскохозяйственной отрасли. Передача различного сечения способна выдержать высокие нагрузки и большую скорость. Машины промышленного класса предполагают использование вариаторов. Наилучшими характеристиками обладают зубчатые ремни. Их применяют как в промышленной, так и в бытовой области. Круглоременная передача применяются для маломощных приборов.
Основным минусом ременной передачи с ЧПУ является качество ремня. Даже самым качественным изделиям свойственно растягивание. Быстрее всего растягиваются длинные виды. Инструмент на растянутых ремнях не может обеспечить высокую точность обработки. Эффект растяжения можно снизить, закрепив два ремня друг на друга. Растягивается лишь определенный отрезок, поэтому этот недостаток не столь опасен.
Передача этого типа обеспечивает мягкие движения, при отсутствии резонанса. Пыль и стружка не способны негативно повлиять на ее работу. Предусмотрена возможность осуществлять натяжку ремня.
Используя станок с ЧПУ следует запомнить несколько факторов:
- зубчатые ремни обеспечивают перемещение подвижных частей агрегата;
- ремни делятся на замкнутые и незамкнутые;
- ремни из полиуретана более износостойкие;
- на станках с ЧПУ допускается использование армированных ремней.
Передача данного типа на приборах с ЧПУ на высоких скоростях способна уменьшить уровень мощности и точности. Данный недостаток решается при помощи установки специального оборудования. После их установки может понадобиться настройка драйверов. Данное действие требуется для того, чтобы сгладить работу агрегата. Оно производится в настройках программы. Значение для шкивов, обеспечивающих правильно перемещение, зависит о того, какой модели выбран станок, или ШВП.

Для агрегатов с числовым программным управлением, использующих ременную передачу, не требуется специальных программоноситель. Программа составляется и разрабатывается в зависимости от того, для какого типа работ она необходима. Для того, чтобы устройство работало исправно в автономном режиме, следует периодически проверять его состояние. Программа не может решить проблему неисправного оборудования.